Riguardo a quanto detto in Descrizione del moto, abbiamo che un moto è detto circolare se la traiettoria del punto è una circonferenza.
Moto circolare uniforme
Prendiamo la velocità angolare come costante. In questo caso, l’approccio migliore sarà imporre la traiettoria di e ricavare velocità e accelerazione di conseguenza. Stabiliamo quindi un sistema di riferimento centrato su una circonferenza di raggio , e poniamo sullo spazio vettoriale :
dove sarà la velocità angolare del punto in rotazione attorno al centro. Deriviamo quindi una volta per trovare il vettore velocità:
e una volta ancora per trovare il vettore accelerazione:
ciò che abbiamo ricavato è l’espressione dell’accelerazione centripeta diretta verso il centro della circonferenza. Notiamo che un modo più chiaro di porla si ha definendo il versore normalizzando e quindi dicendo:
dove è la velocità tangenziale del punto sulla circonferenza, legata a da:
Questo si ha semplicemente da:
Moto circolare non uniforme
Concediamo che la velocità angolare vari, cioè che esista una certa accelerazione angolare . In questo caso è utile prendere i parametri angolari come funzioni di , e quindi definire:
- La posizione angolare ;
- La velocità angolare ;
- L’accelerazione angolare . Vediamo quindi due modi per descrivere la situazione dal punto di vista matematico e ricavare un espressione dell’accelerazione complessiva sul punto.
Coordinate cartesiane
Definiti i parametri angolari, e stabilito un sistema di riferimento centrato su una circonferenza di raggio , poniamo sullo spazio vettoriale la solita funzione del moto:
Deriviamo quindi una volta per trovare il vettore velocità:
e una volta ancora per trovare il vettore accelerazione:
In questa espressione abbiamo tutti i termini di cui abbiamo bisogno per descrivere le forze a cui è soggetto un punto in moto circolare arbitrario (abbiamo anche una simulazione numerica in questo Desmos), ma risultano abbastanza scomode da leggere. Vediamo quindi un approccio che ci permette di scrivere la stessa cosa in maniera più sintetica.
Con versori
Potrebbe essere utile denominare il versore come quello rivolto in direzione tangenziale alla circonferenza su cui ci troviamo. Questo sarà definito come:
A questo punto l’espressione del vettore velocità sarà semplice, preso come il vettore velocità angolare un vettore allineato all’asse di rotazione con modulo pari a :
Notiamo poi che, per come abbiamo definito i nostri versori, vale:
Ricavare l’accelerazione è quindi facile:
dove è il vettore accelerazione angolare, definito come il vettore velocità angolare ma con modulo . Questa espressione, riportandosi ai versori, dà:
cioè abbiamo scomposto l’accelerazione in una componente tangenziale data dall’accelerazione angolare:
e in una componente radiale data dall’accelerazione centripeta, uguale al caso uniforme:
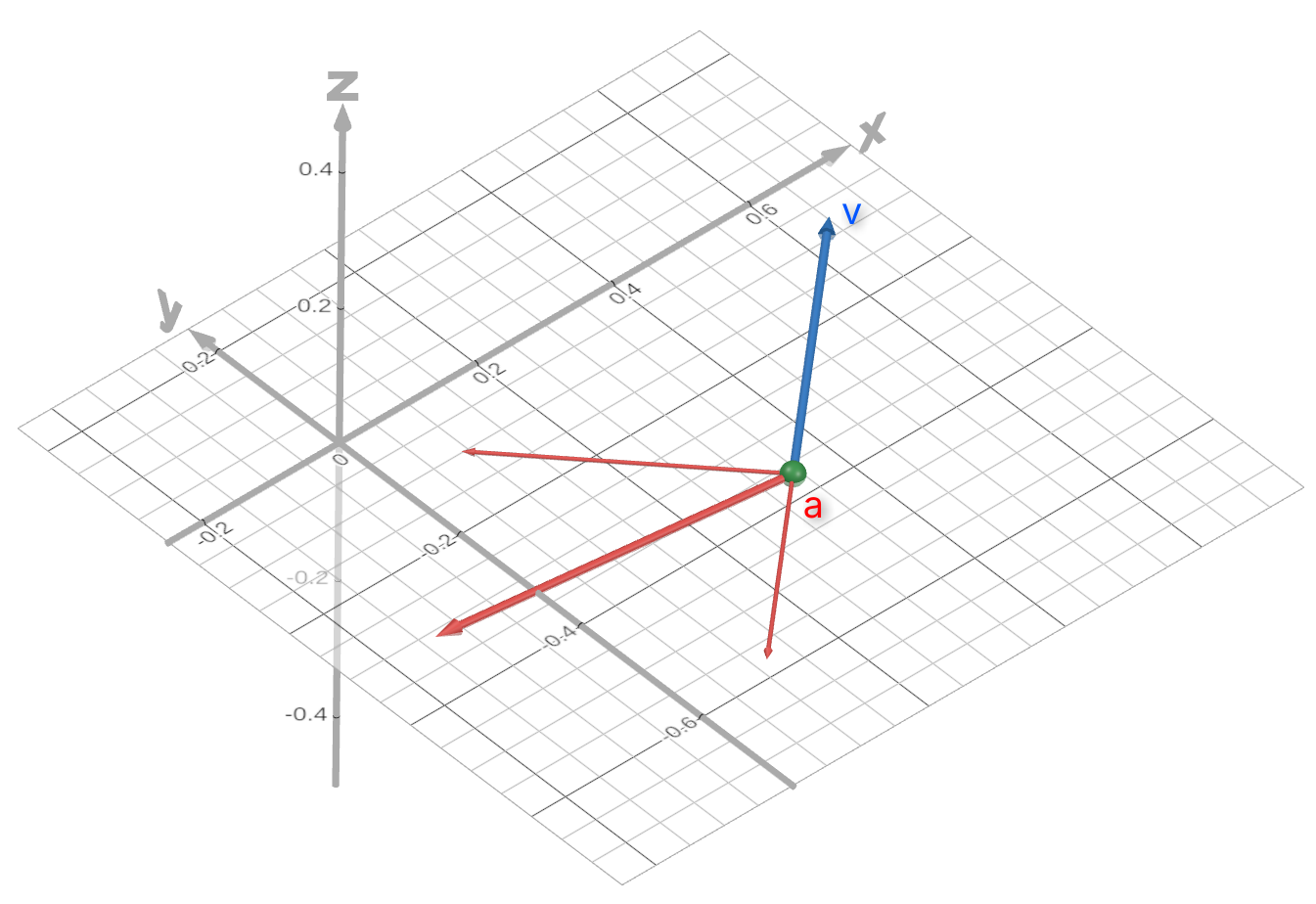
Un esempio numerico dei calcoli fatti in questi ultimi paragrafi, che mette in evidenza la componente tangenziale dell’accelerazione, è disponibile nel seguente Desmos.