Per individuare la posizione di un punto all’interno di uno spazio euclideo abbiamo bisogno di un sistema di riferimento che ci riporti a coordinate in . Infatti avevamo detto:
Il fatto che lo spazio euclideo è sostanzialmente uno spazio affine significa che i suoi elementi sono punti, e non vale la dualità punto/vettore. Per riportarci ad uno spazio vettoriale con origine nota e su cui i punti possono essere trattati come vettori avremo bisogno di un Sistema di riferimento.
Formalmente, un sistema di riferimento è una mappa che associa un istante temporale ad un origine e 3 versori che indicano le direzioni degli assi, , , :
dove notiamo che la mappa è continua e dipende da (la posizione dell’origine e i 3 assi , , possono variare nel tempo). Per i 3 assi vogliamo assicurare l’indipendenza lineare (in modo che questi possano fare da basi di uno spazio fissata l’origine in , per cui diremo che obbediscono:
dove rappresenta la delta di Kronecker, definita come:
Concludiamo dicendo che per brevità, ci riferiamo ai sistemi di riferimento come , o solo .
Rappresentazione in coordinate
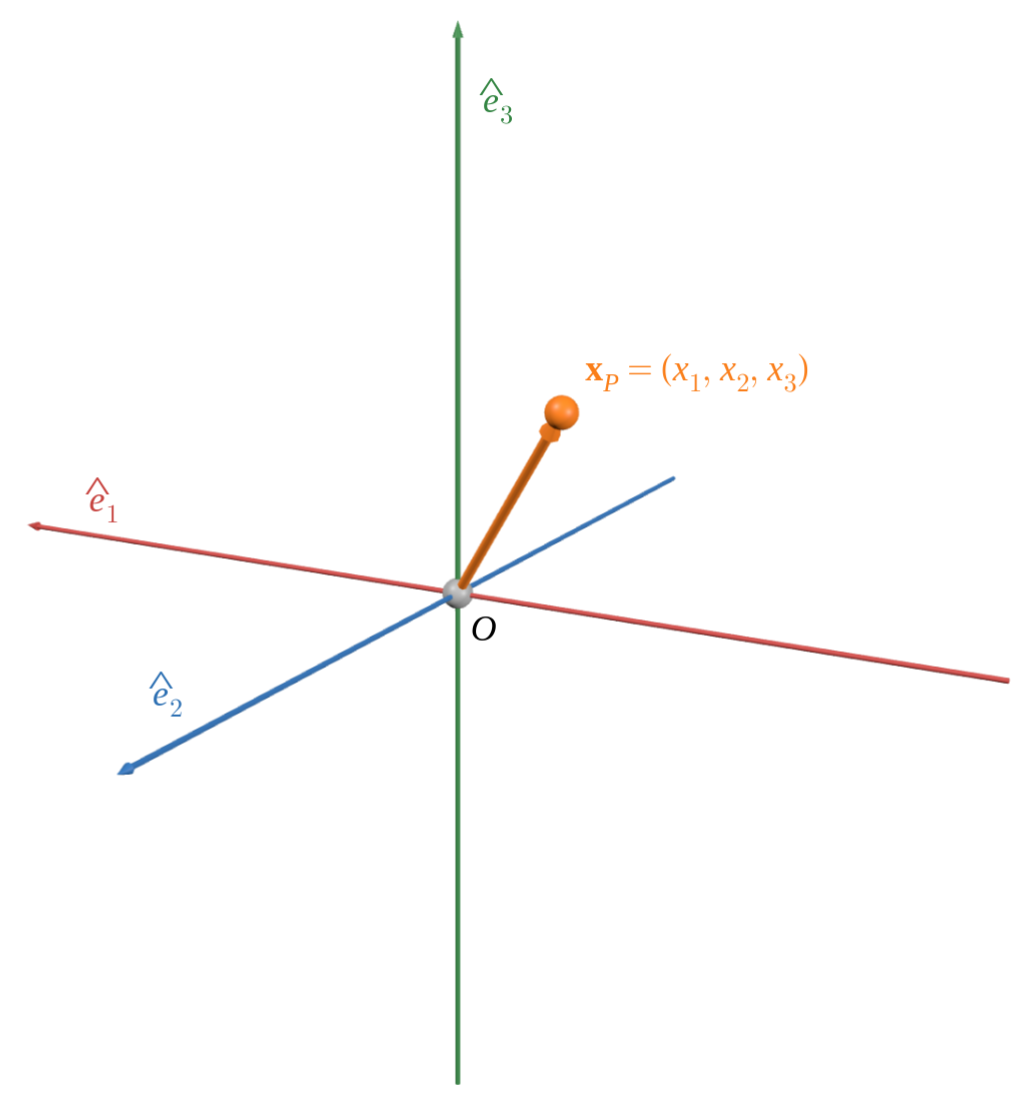
Una volta definito un sistema di riferimento , vorremmo esplicitare come si passa dal punto qualsiasi:
nello spazio di Eulero, alla sua rappresentazione come vettore nello spazio vettoriale associato al sistema di riferimento:
o analogamente alla rappresentazione in coordinate (già introdotte in Prodotto vettoriale) nello spazio rispetto al sistema di riferimento:
dove gli , , sono quelli della formula precedente. Chiamiamo il vettore o vettore posizione. Per il vettore posizione assumiamo le ipotesi di regolarità, cioè che questo sia derivabile infinite volte (cosa che ci tornerà utile in Descrizione del moto).
Da punti a coordinate
Vediamo quindi di riassumere un ultima volta il processo di conversione da un punto nello spazio euclideo , rappresentato in maniera affine (quindi senza sistema di riferimento), alla sua rappresentazione come coordinate in , rispetto ad un dato sistema di riferimento .
- Abbiamo che innanzitutto dobbiamo prendere l’elemento dello spazio di traslazione che rappresenta lo scostamento di dall’origine , cioè: $$ \vec{x}_P = P - O \in \mathbb{V}^3
- Questo dovrà quindi essere riportato alla tripla attraverso la proiezione di sui 3 assi , , del punto , cioè: e quindi:
Con questo processo, quindi, ci saremo ricondotti al vettore . Una visualizzazione si può trovare su Desmos. Notiamo che questa visualizzazione “bara” in quanto in un sistema calcolatore è sostanzialmente impossibile rappresentare uno spazio veramente affine, e sicuramente lo è in Desmos. Per questo motivo sia che sono in verità espressi sempre in coordinate come vettori di (e quindi rispetto all’origine nulla). Quindi, scelti i 3 assi , e si va a calcolare , e usando le solite formule di proiezione su vettore:
Questo è comunque quello che fanno la maggior parte dei motori fisici in commercio.